22
NASA/JPL-Caltech/James Sorenson
NASA/JPL-Caltech/James Sorenson
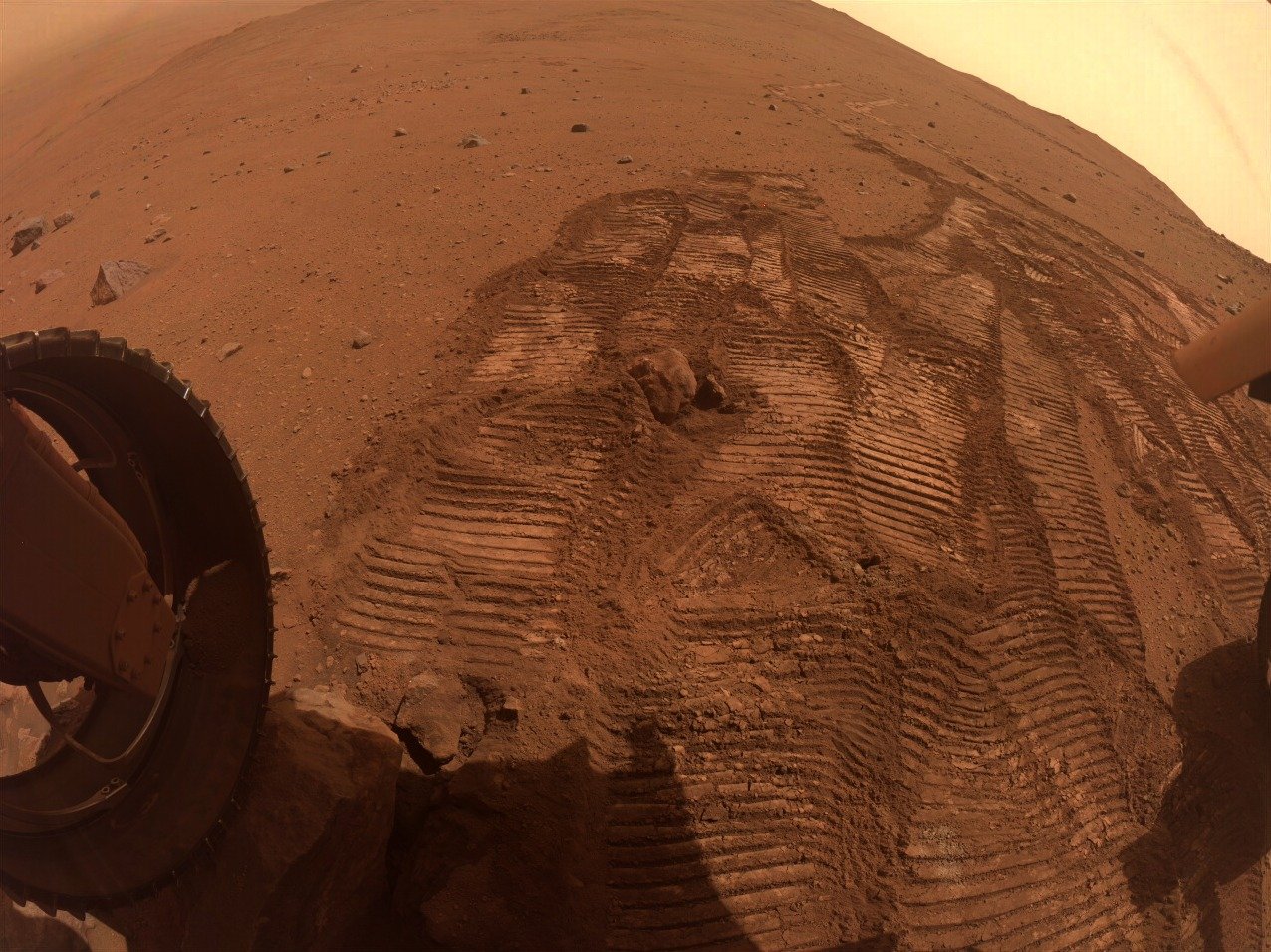
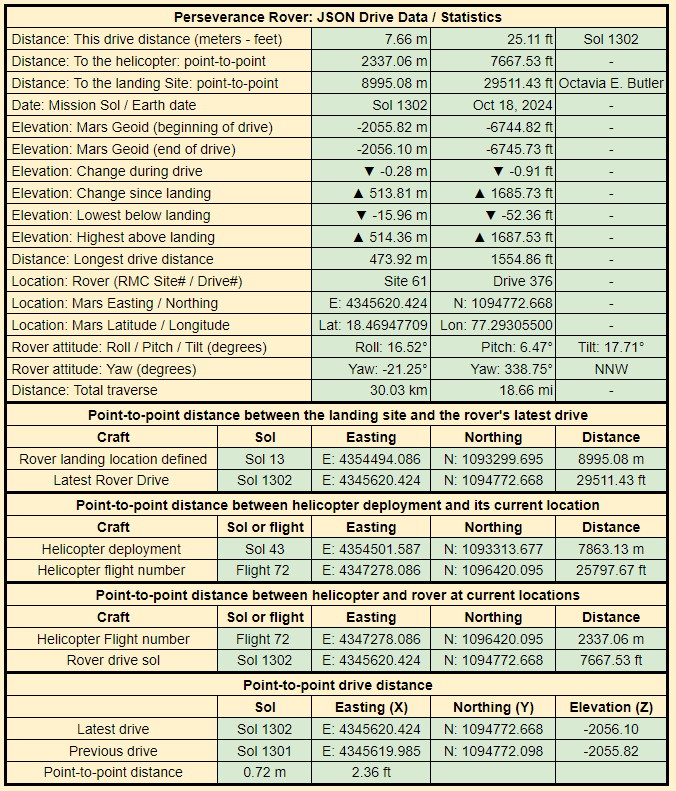
Cropped from a 9-tile post drive R-NavCam. The drive distance may have been over 7 meters, but the point-to-point distance was less than one meter. This long drive may have been a result of the rover having one of its wheels perched on a rock, leaving it unstable for un-stowing the robotic arm.
I'm assuming we'll see some closer inspection of this target over the weekend.

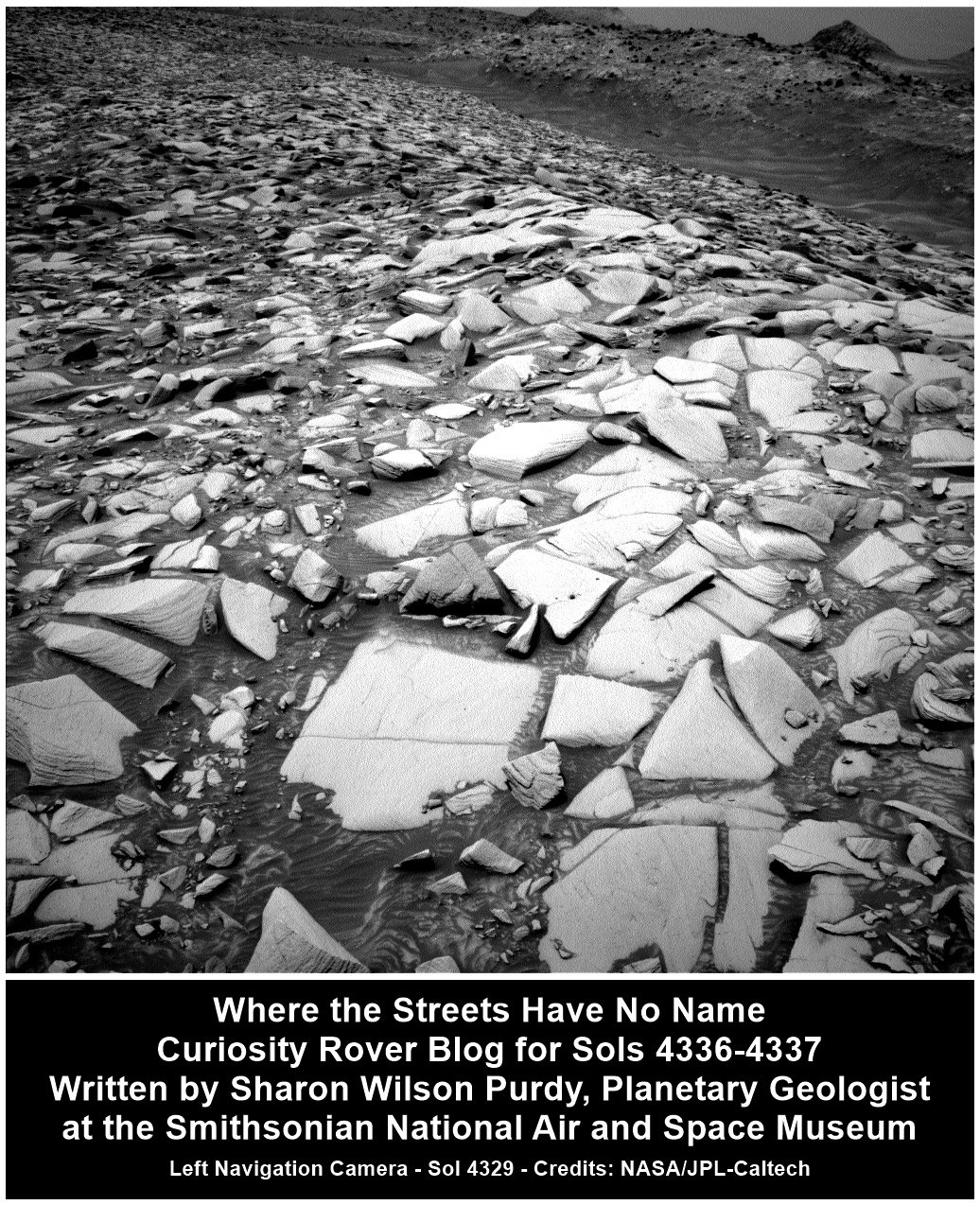
Where the Streets Have No Name - Curiosity Rover Blog for Sols 4336-4337. Earth planning date: Wednesday October 16, 2024
Curiosity continues to drive along the western edge of the upper Gediz Vallis channel. After exiting the channel a few weeks ago, we turned north to image the “back side” of the deposits that we investigated on the eastern side before the channel crossing. As a member of the Channel Surfers working group, we believe that acquiring these views will help further our understanding of the geometry, nature, and evolution of these landforms. The bumpy terrain in front of us, however, plays a role in determining our route and length of drive. The rover planners on the team always do a fantastic job in charting the course on this once-in-a-lifetime road trip. I like to imagine Curiosity with the windows down, blaring U2, as she steadily blazes a new path across the sulfate unit.
With an eye towards imaging in this two-sol plan, Mastcam crafted a large mosaic of “Fascination Turret” that rises above the channel floor. ChemCam fit an unprecedented number of long distance RMI images in the plan that will document the upper extent of the white stone deposit, the nature of the “Kukenan” mound, and characterize the rocks in Fascination Turret at targets named “Chimney Tree” and “Forgotten Canyon.” In our immediate workspace, ChemCam used the Laser Induced Breakdown Spectroscopy (LIBS) instrument on a laminated (very thinly bedded) bedrock in the workspace at “Puppet Lake” to determine its chemical composition, which will be documented with a coordinating Mastcam image. MAHLI and AXPS teamed up to analyze a cluster of small gray rocks in front of us at “Jumble Lake.”
The second sol includes a 25-meter (about 82 feet) drive to the west/northwest as we continue along our path adjacent to the channel. The Environmental theme group included a range of activities such as a Mastcam tau that will measure the optical depth of the atmosphere and constrain aerosol scattering properties, dust devil movies, and a suprahorizon movie to monitor clouds.
Written by Sharon Wilson Purdy, Planetary Geologist at the Smithsonian National Air and Space Museum
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4336-4337-where-the-streets-have-no-name/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech
Apologies for the stitching errors (upper right of the slope) MS-ICE didn't do a great job this time, and I missed it before sharing
assembled 6 overlapping NavCam tiles to get this simple mosaic of the workspace. Assembled in PhotoScape and MS-ICE.
NASA/JPL-Caltech
You mean “notional path to the SSW”, Paul, no?
They chose North on 1301 :) see https://mars.nasa.gov/maps/location/?mission=M20
Not quite the place I was thinking of, but we have a good selection of targets for arm work :)
My bad, SSW... Fat fingers 😮
This is a 4-tile end-of-drive NavCam. The rear of the rover is pointing NE. Assembled in MS-ICE - Credits: NASA/JPL-Caltech
Not sure why it was such a short drive, the workspace is just sandy regolith, and there was no wheel slip during the drive. Maybe they are deciding which path to take, the notional path to the SSW or head north to some white rocks seen upslope... Decisions decisions ;)
fixed typo in direction of notional path :)
Planning with Popsicles - A Clipper Celebration! - Curiosity Rover Blog for Sols 4334-4335. Earth planning date: Monday October 14, 2024
Today was an unusually exciting day during tactical planning on the Curiosity mission because it intersected with a momentous event in space exploration: the launch of Europa Clipper from Kennedy Space Center. Even though the launch window occurred right in the middle of our morning planning meetings, at 9:06 a.m. PDT to be specific, today’s Tactical Uplink Lead and Science Operations Working Group Chair agreed it would be OK for the entire tactical team to take a 15-minute pause to turn on NASA TV and watch the launch together. Down the hall the Perseverance rover tactical team had decided the same, and for a few moments, the two teams paused their planning and watched together in anticipation as the countdown ticked down to T-0. Many of my close friends and co-workers had worked for years — some for decades — to make this mission a reality, and it was amazing to watch the enormous rocket carrying the Clipper spacecraft leap off the pad knowing how hard it was to get to this point. I cannot wait for the mission’s discoveries once it reaches Jupiter’s watery moon Europa!
In true JPL tradition, we of course had to commemorate the event with some sweet frozen treats on-lab. Back when Curiosity landed, we had a full fridge of ice cream that was kept stocked for the first 90 sols of the mission. (Eating ice cream cones at 2 in the morning is a core memory of mine from those early days in our mission.) Today, in a clever nod to Europa’s icy surface, we celebrated with some even icier sweets: fruit and coffee popsicles to anyone on-lab. I chose coffee of course; the caffeine was great to help me get through a busy day of planning for Curiosity!
On Mars, things with our rover are going well. We completed our mega ~50-meter drive (about 164 feet) over the weekend, which took Curiosity further north along the western side of Gediz Vallis channel. Our plan today is a “touch and go,” which means we’ll do contact science with APXS and MAHLI on a block in front of us named “Dollar Lake,” some remote sensing, including ChemCam LIBS of a target named “Cape Horn” and a couple Mastcam mosaics, followed by a drive to the north. We’ll continue to follow the western side of Gediz Vallis channel as we descend slightly down Mount Sharp, until we reach a location where we are able to head west towards a more easily traversable valley, and then restart our ascent.
What a fun day of planning today. Congratulations to everyone involved helping Europa Clipper reach this incredible milestone, and go Clipper go!
Written by Abigail Fraeman, Planetary Geologist at NASA's Jet Propulsion Laboratory
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4334-4335-planning-with-popsicles-a-clipper-celebration/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech

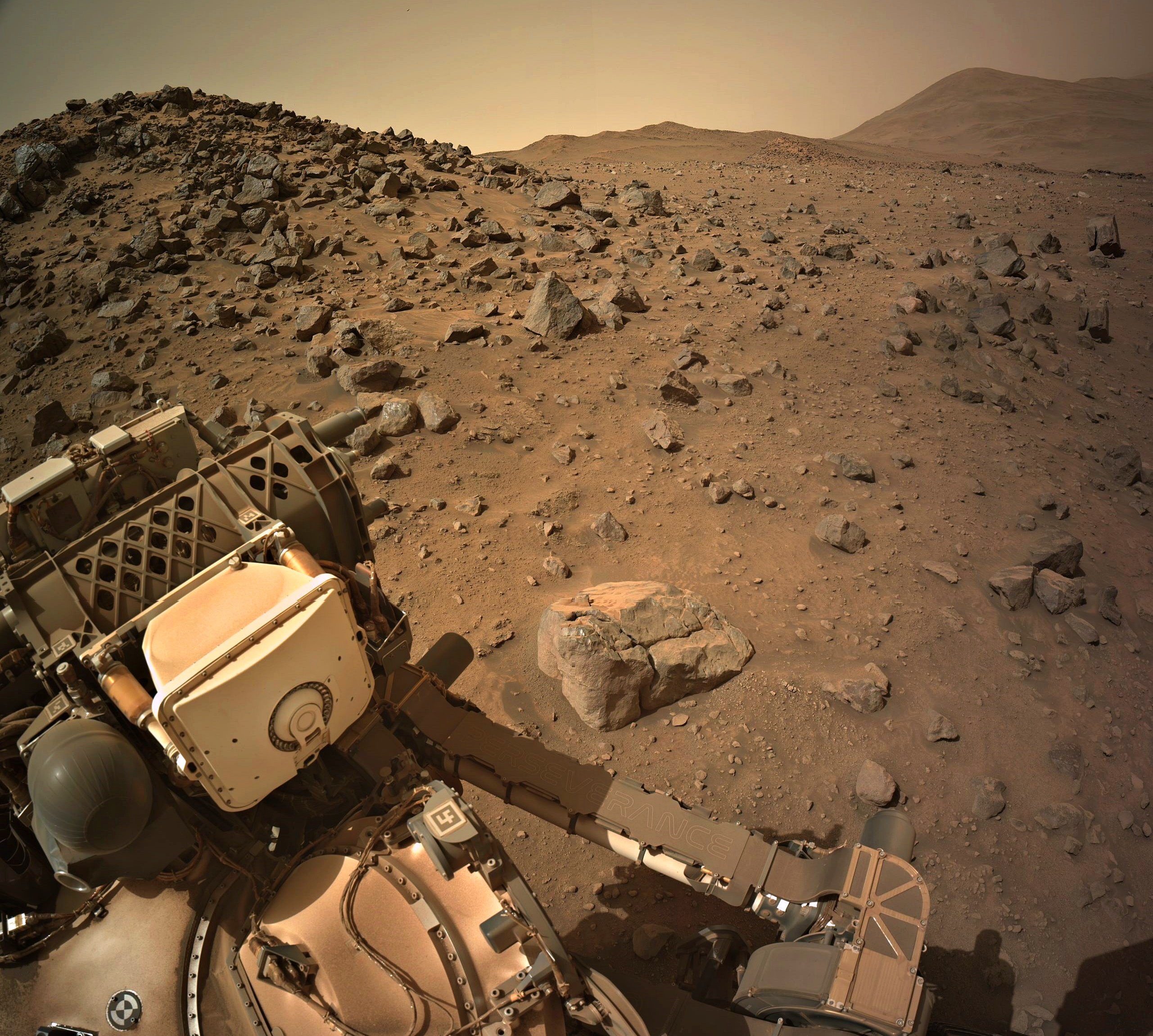
The rover is currently driving up the rim wall of Jezero crater. The rim wall was created by a huge impact in Mars early history. So we could be looking at some of the oldest rocks that were uplifted during the impact. I'm clearly not a geologist, so it will be interesting to see the results of the investigations of the rocks in this region by the science team.
Perseverance rover acquired this image using its Left Mastcam-Z camera. Mastcam-Z is a pair of cameras located high on the rover's mast.
This image was acquired on October 15, 2024 (Sol 1299) at the local mean solar time of 11:40:37.
Image Credit: NASA/JPL-Caltech/ASU

Wouldn't want to catch your spacesuit on that ;) Have to use some of your expensive duct tape :)
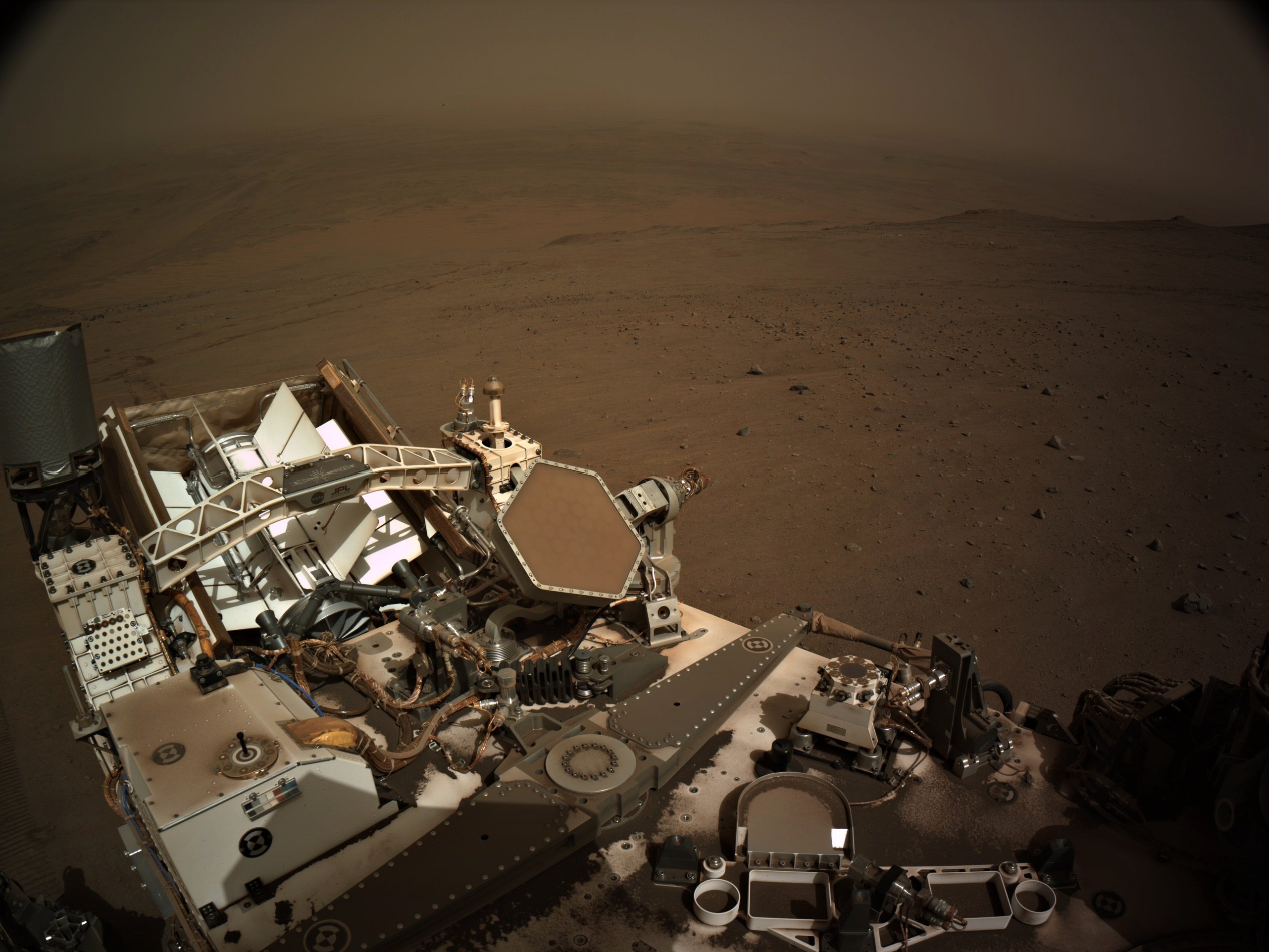
Several years ago they did an engineering study that basically stated that when a specific number of cleats broke it had used up a percentage of its life. We're past that stage now. They have since developed a scenario that will allow them to rip one half of the damaged wheel off, and still drive on the remaining half.... All of the wheels are motorized, losing one wheel won't stop the rover from traversing to it's science waypoints
@weariedfae
It is possible, as the rover is heading for Bright Angel (BA) it's the west of the current location. This float rock could be from Bright Angel, so could have been washed down Neretva Vallis by floods etc ~3 billion years ago. BA appears to the white in the HIRISE images, BA is thought to be the oldest rocks the rover will encounter and probably predate the impact that formed the crater, so they could be of volcanic origin... Watch this space
Edit. fixed typos
It may not be able to fly, but it is far from fully broken.... It has returned a huge number of images since its last flight, as well as data. They hoped to continue to get data right up until the rover left the crater, but a bad sandstorm could prevent that
From the data that JPL got before the brownout the helicopter was only 1 meter from the ground when it all went wrong. Sadly the brownout meant no data from the IMU was saved in those last seconds before it landed. It must have experienced some pretty harsh vibrations. But it powered up again and has been communicating via the rover to Earth. It has sent back an incredible 2,396 images and a bunch of engineering data since the emergency landing (all those images are post landing) Link to the post landing images:- https://mars.nasa.gov/mars2020/multimedia/raw-images/?begin_sol=1036&end_sol=1136&af=HELI_NAV,HELI_RTE
Since deployment it has sent back 14,551 images (so far) and they will stay in touch with it until the rover drives out of Jezero when radio contact will be lost. The helicopter has no off button. It will wake up every morning that its batteries etc keep working, it will wait until a preset time and it will listen for a radio call from the rover for exactly 50 minutes, if it gets no call, it will go back to sleep, and awake the next day and repeat until its no longer able.



Look close - You'll see one of the rear wheels perched on a rock.
They will likely not perform any arm work in this state.